2021-04-28 17:06 来源:网络整理
文章摘要
浙江大学及其孵化的机器人团队4日发布四足机器人绝影的迭代版本。新一代绝影在原基础上进一步提升算法,已具备
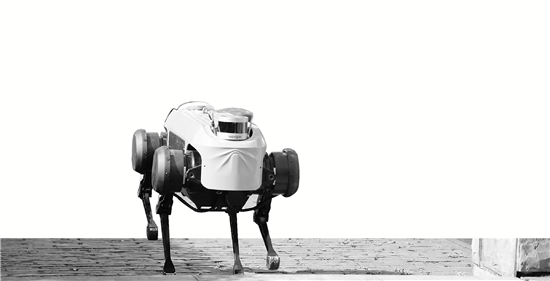
浙江大学及其孵化的机器人团队4日发布四足机器人“绝影”的迭代版本。新一代“绝影”在原基础上进一步提升算法,已具备跑步及上下台阶的能力。“绝影”由浙大控制学院、工程师学院教师朱秋国与浙大孵化企业云深处科技合作开发。在团队发布的视频中,记者看到“绝影”在塑胶跑道上富有节奏感地一路“小跑”,身体和四肢有细微的跃动姿态。
朱秋国告诉记者,在跑步时,“绝影”有近三分之一的时间是四足腾空的状态。 “比起行走时始终有足着地的状态,四足腾空意味着空中状态不受控,在着地时会受到更大的冲击力。在空中如何更好地保持平衡,在着地时更快地恢复动态稳定,这些细微之处体现了控制算法的最新进展。”朱秋国说。
此外,视频还展示了“绝影”在遇到堆放障碍物的台阶后,迅速调整步伐频率与高度,快速适应地形。在这一过程中虽然受到外力干扰、踩空打滑等影响,但“绝影”都迅速恢复了平衡。

据了解,“绝影”身长1米,四足站立时60厘米高,重70千克,载重可达到20公斤,跑步速度大于每小时6公里,续航时间2小时。
“绝影”四足机器人于今年2月首次发布,展现出反应快、姿态稳、定位准的性能,对复杂环境有很强的适应能力,引发高度关注。据介绍,“绝影”四足机器人可搭载多种设备,有望在安防巡检、物流运输、教育科研等方面进行实际应用。

在消费升级的大背景下,家居行业盛会华夏家博会贵阳站即将拉开帷幕。将于 6月2 8 日-6月29日...